Un sensor es un dispositivo capaz de detectar magnitudes físicas o químicas, llamadas variables de instrumentación, y transformarlas en variables eléctricas. Las variables de instrumentación pueden ser por ejemplo: temperatura, intensidad lumínica, distancia, aceleración, inclinación, desplazamiento, presión, fuerza, torsión, humedad, pH, etc. Una magnitud eléctrica puede ser una resistencia eléctrica (como en una RTD), una capacidad eléctrica (como en un sensor de humedad), una Tensión eléctrica (como en un termopar), una corriente eléctrica (como en un fototransistor), etc.
Un sensor se diferencia de un transductor en que el sensor está siempre en contacto con la variable de instrumentación con lo que puede decirse también que es un dispositivo que aprovecha una de sus propiedades con el fin de adaptar la señal que mide para que la pueda interpretar otro dispositivo. Como por ejemplo el termómetro de mercurio que aprovecha la propiedad que posee el mercurio de dilatarse o contraerse por la acción de la temperatura. Un sensor también puede decirse que es un dispositivo que convierte una forma de energía en otra. Áreas de aplicación de los sensores: Industria automotriz, Industria aeroespacial, Medicina , Industria de manufactura, Robótica , etc.
SENSORES INDUCTIVOS:Los sensores inductivos son una clase especial de sensores que sirven para detectar materiales metálicos ferrosos. Son de gran utilización en la industria, tanto para aplicaciones de posicionamiento como para detectar la presencia o ausencia de objetos metálicos en un determinado contexto: detección de paso, de atasco, de codificación y de conteo.
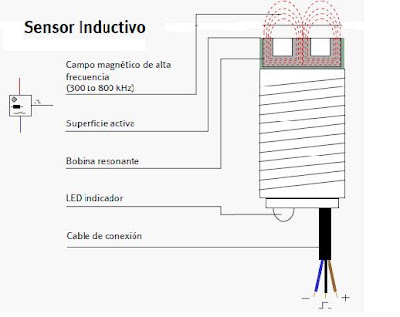
CARACTERISTICAS:En el momento del diseño de aplicaciones donde se usen sensores inductivos, se deben tener en cuenta una serie de caracteristicas técnicas de este tipo de sensores que pueden afectar a su comportamiento y hacer que éste no sea el adecuado o esperado.
La superficie del objeto a detectar no debe ser menor que el diámetro del sensor de proximidad (preferentemente 2 veces más grande que el tamaño o diámetro del sensor). Si fuera menor que el 50% del diámetro del sensor, la distancia de detección disminuye sustancialmente.
Debido a las limitaciones de los campos magnéticos, los sensores inductivos tienen una distancia de detección pequeña comparados con otros tipos de sensores. Esta distancia puede variar, en función del tipo de sensor inductivo, desde fracciones de milímetros hasta 40 mm en promedio.SENSORES CAPACITIVOS:Desde el punto de vista puramente teórico, se dice que el sensor está formado por un oscilador cuya capacidad la forman un electrodo interno (parte del propio sensor) y otro externo (constituido por una pieza conectada a masa). El electrodo externo puede estar realizado de dos modo diferentes; en algunas aplicaciones dicho electrodo es el propio objeto a sensar, previamente conectado a masa; entonces la capacidad en cuestión variará en función de la distancia que hay entre el sensor y el objeto. En cambio, en otras aplicaciones se coloca una masa fija y, entonces, el cuerpo a detectar utilizado como dieléctrico se introduce entre la masa. y la placa activa, modificando así las características del condensador equivalente.

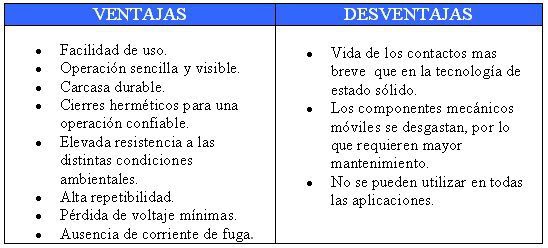
Ventajas e Inconvenientes
Las ventajas de este dispositivo son algunas más que en el caso de los sensores inductivos. La primera ventaja es común para ambos, detectan sin necesidad de contacto físico, pero además esto sensor lo realiza de cualquier objeto. Además, debido a su funcionamiento tiene muy buena adaptación a los entornos industriales, adecuado para la detección de materiales polvorientos o granulados. La duración de este sensor es independiente del número de maniobras que realice y soporta bien las cadencias de funcionamiento elevados. Entre los inconvenientes se encuentra el alcance, dependiendo del diámetro del sensor, puede alcanzar hasta los 60mm, igual que la modalidad inductiva. Otro inconveniente es que depende de la masa a detectar, si quiero realizar una detección de cualquier tipo de objeto este sensor no nos sirve, puesto que depende de la constante eléctrica. Esta desventaja viene encadenada con la puesta en servicio, antes de colocar el sensor lo tenemos que instalar; los detectores cuentan con un potenciómetro de ajuste que permite ajustar la sensibilidad. Según la aplicación será necesario adaptar el ajuste, por ejemplo para materiales de constante dieléctrica (er) débil como el papel, cartón o vidrio, en caso de tener una er fuerte tenemos que reducir la sensibilidad, con objetos del tipo metales o líquidos. CARACTERISTICAS: Existen muchas aplicaciones que requieren el sensar a distancia materiales no metálicos y, para ello se emplea este tipo de sensor que usa el efecto capacitivo a tierra de los objetos a sensar. Ejemplos: Presencia de agua en un tubo o el cereal dentro de una caja de cartón.
_ Principalmente se emplean para líquidos y sólidos no metálicos y, externamente son muy parecidos a los sensores inductivos (Ver arriba)
_Además, la distancia de sensado siempre se especifica para agua en estado líquido pero, para otros materiales es diferente. Para el vidrio se tiene que considerar un factor de corrección del 65%, mientras que para el agua congelada del 30%.
SENSORES FOTOELECTRICOS: Un sensor fotoeléctrico es un dispositivo electrónico que responde al cambio en la intensidad de la luz. Estos sensores requieren de un componente emisor que genera la luz, y un componente receptor que “ve” la luz generada por el emisor. Todos los diferentes modos de sensado se basan en este principio de funcionamiento. Están diseñados especialmente para la detección, clasificación y posicionado de objetos; la detección de formas, colores y diferencias de superficie, incluso bajo condiciones ambientales extremas.
CARACTERÍSTICAS:Estos sensores son muy usados en algunas industrias para contar piezas, detectar colores, etc., ya que reemplazan una palanca mecánica por un rayo de luz que puede ser usado en distancias de menos de 20 mm hasta de varias centenas de metros, de acuerdo con los lentes ópticos empleados.
_Los fotodetectores son típicamente fotodiodos o fototransistores, inclinándose los fabricantes por los primeros por su insensibilidad a campos de radiofrecuencia, que podrían causar interferencia
*Los diferentes tipos de sensores se agrupan por el tipo de detección:
a) Sensores de Transmisión Directa. Cuando existe un receptor y un emisor apuntados uno al otro. Tiene este método el más alto rango de detección (hasta unos 60 m).
b) Sensores Reflex. Cuando la luz es reflejada por un reflector especial cuya particularidad es que devuelve la luz en el mismo ángulo que la recibe ( 9 m de alcance).
c) Sensores Reflex Polarizados. Son prácticamente iguales a los del tipo anterior, excepto que, el emisor tiene un lente que polariza la luz en un sentido y el receptor otro que la recibe mediante un lente con polarización a 90 ° del primero. Con ésto, el control no responde a objetos muy brillosos que pueden reflejar la señal emitida (5m de alcance).
d) Sensores de Foco Fijo. Cuando la luz es reflejada difusamente por el objeto y es detectado por el hecho de que el transmisor y el receptor están estereoscópicamente acoplados, evitando con ello interferencia del fondo (3.5 m de alcance). sensores de barrera: Cuando existe un emisor y un receptor apuntados uno al otro (este método tiene el más alto nivel de detección)

sensores réflex: Cuando la luz es reflejado con un reflector especial, cuya característica es que devuelve la luz en el mismo ángulo que la recudida.
_La luz infrarroja viaja en línea recta, en el momento en que un objeto se interpone el haz de luz rebota contra este y cambia de dirección permitiendo que la luz sea enviada al receptor y el elemento sea censado, un objeto de color negro no es detectado ya que este color absorbe la luz y el sensor no experimenta cambios.